ARCAD Biped Lab
University of Michigan, Ann Arbor
Researcher (Jan 2025 - Present)
The Agile Robot Control and Design (ARCaD) Lab advances legged robot agility by developing novel control algorithms and hardware. The work combines optimal control, mechatronic integration, and reinforcement learning to achieve agile motions on real platforms, bridging theory with practical implementation.


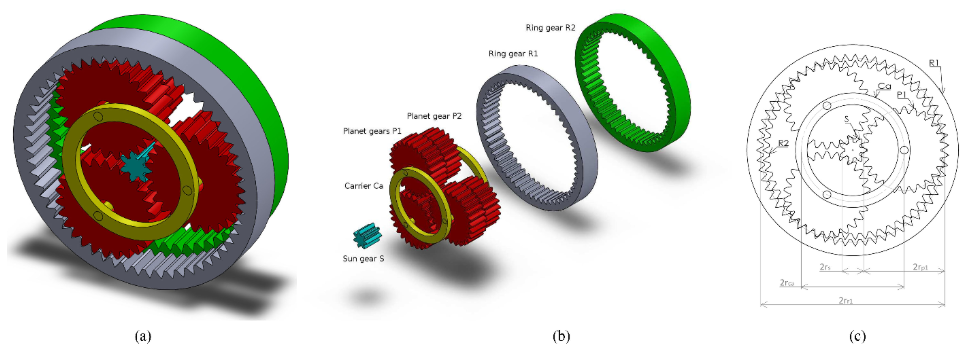
Schematic and CAD representation of the Bilateral Gear Drive, adapted from “A Bilateral Drive System for Robotics Applications” (IEEE, 2019)
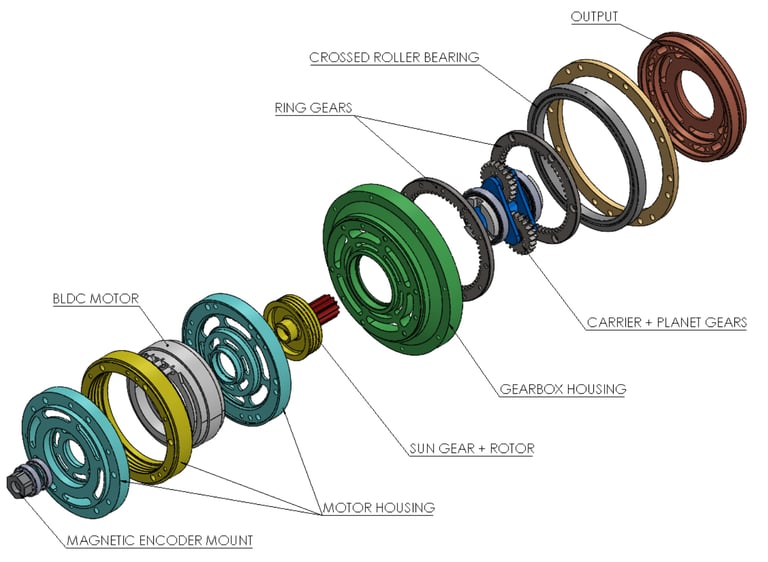
Prototype & Exploded View of Wolfrom-Drive Actuator
Goal: Design a compact humanoid joint actuator with high torque density, low reflected inertia, and high efficiency.
Architecture: Custom Bilateral Gear Drive (Wolfrom compound planetary reducer) integrated with a frameless BLDC motor, crossed-roller output bearing, and magnetic encoder in a coaxial package.
Engineering Work:
Analytical modelling of gearbox kinematics and dynamics in Python to evaluate configurations and select optimal ratios.
Detailed gear geometry and actuator CAD using SolidWorks and GearTeq.
Full actuator integration, including gearing, bearings, motor, housing, and encoder.
Manufacturability:
Function-driven GD&T, tolerance stack-up, fits, and datum structures for repeatable, non-ambiguous assembly.
Rapid prototyping to validate assembly sequence and packaging.
DFM feedback incorporated from U.S. and China fabrication vendors.