Twara Robotics
Lead Engineer, Robotic Manipulators (Jan 2024 - July 2024)
Engineer, Robotic Actuators (Jan 2023 - Dec 2023)
Twara Robotics is a federally funded start-up based out of ARTPARK, Indian Institute of Science (IISc), Bangalore. The company focuses on the indigenous development and manufacturing of core robotics components, including manipulators, grippers, AMRs, motor drivers, and advanced actuators. I joined as an engineer on the robotic actuators team and was later promoted to a lead engineer heading the robotic manipulators team.
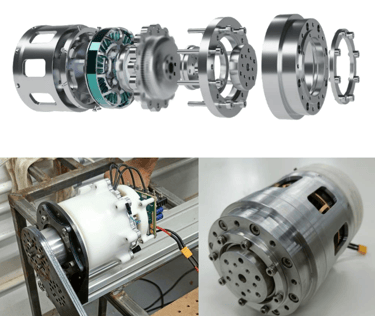
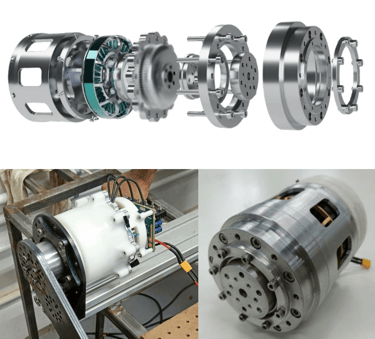
Custom SWG Actuator on demo at Automation Exp 2024, India & the Datasheet for SWM25 (Version release: Oct 2025)
©Twara Robotics (via LinkedIn)
On the robotic actuators team, I worked on the development of an integrated joint actuator with a custom strain-wave / harmonic drive gearbox with solenoid brakes.
Designed and iterated 15+ gearbox versions, optimising gear profiles, spline geometry, and material/manufacturing methods.
Implemented 8 custom test rigs, conducting 50+ tests for torque, backlash, and lifecycle; benchmarked against commercial gearboxes.
Achieved 30× lifecycle and 5× torque improvements; filed a patent on a novel plastic strain-wave gearbox, now field-tested by 5 pilot clients.
Led a team of 3 engineers to design and develop articulated robotic manipulators (3–10 kg payload, 4–6 DOF) and an underactuated two-jaw adaptive gripper.
Conducted benchmarking and performance analysis of commercial cobots (UR, IGUS) and grippers (Robotiq, OnRobot).
Automated a CAD design pipeline by linking kinematic synthesis and multibody dynamic models with parametric SolidWorks, MATLAB, and Adams simulation.
Oversaw intern recruitment and mentoring, contributing to project scaling and team growth.
The 6-DOF articulated manipulator (TR5) in various stages of development
©Twara Robotics (via LinkedIn)
Designed and built a four-wheeled AMR base (20–30 kg payload) capable of 1 m/s travel and zero-radius turning.
Used support polygon analysis to ensure stability and performed drivetrain calculations for motor sizing. Designed a miter-gear and belt drive transmission.
Developed a compact chassis with a two-drive, two-caster wheel configuration.
Implemented an extension spring-based swing arm suspension system. Incorporated a screw-pair-based spring pre-loading mechanism for variable payload suspension tuning.

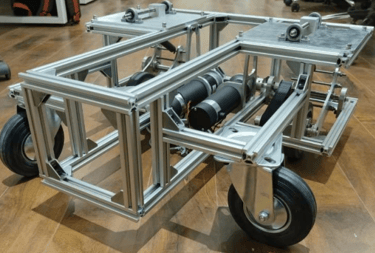
AMR Base prototype and on demo at Automation Expo 2024, India
©Twara Robotics (via LinkedIn)


AMR system used for Telepresence Robot
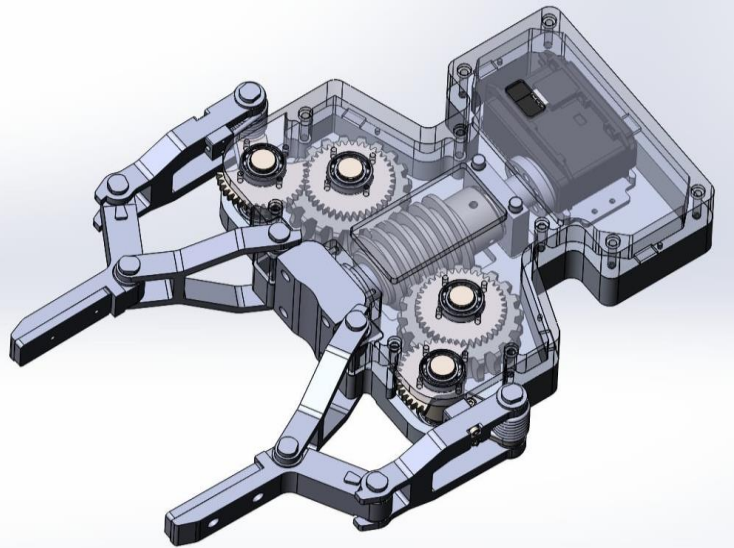
Designed an underactuated gripper with adaptive parallel and encompassing grip modes.
The gripper uses a torsion spring-loaded 5-bar linkage driven by a worm drive.
Underactuated adaptive gripper